I wrote a research paper about a lunar rover design. The goal is to support astronauts on a future lunar base. It is powered by a nuclear power source and has 2 robotic arms that can move cargo, deploy scientific instruments, etc. The arms have modular robotic hands that allow for a variety of tasks to be completed.
This paper is being published in the National High School Journal of Science (NHSJS) -> https://nhsjs.com/2025/a-lunar-rover-design-for-a-future-crewed-lunar-base/
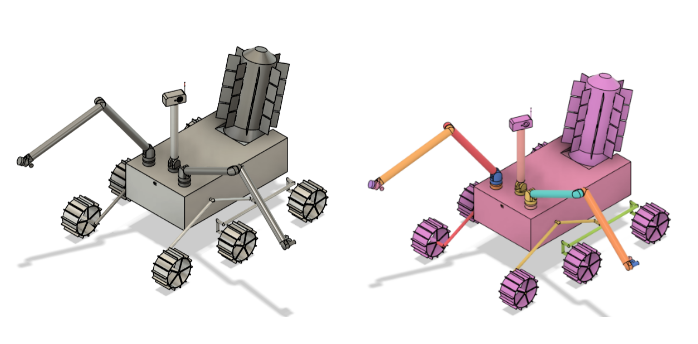
Figure 22. The full rover design
ABSTRACT: A permanent lunar base is one of the later goals of the Artemis program from NASA. A lunar base will require significant robotic assistance to be properly built and maintained. This research aims to develop a teleoperated lunar rover design that can aid astronauts in maintaining and performing work around a lunar base. The necessity of this rover is due to the hazardous nature of lunar dust and cosmic radiation. Minimizing astronauts’ time outside of a shielded environment is crucial for their health. The designed rover includes two modular robotic arms that can perform a variety of tasks, a nuclear power source to allow for power throughout the lunar day-night cycle, and a rocker-bogie wheel mechanism to ensure the stability of the rover. This paper focuses on each subsystem of the rover, detailing the design, what design choices were made, and why. This research introduces a modular, RTG-powered lunar rover designed to perform complex interdependent tasks in a harsh environment.